

前言:2017年,随着奥迪A8首次在量产车型上搭载来自法雷奥的激光雷达,激光雷达就被视为实现几何算法必备的传感器。进入2021年以来,从各家新车型的发布来看,激光雷达也开始在旗舰车型上实现量产。本文针对量产的激光雷达结构进行阐述,限于篇幅仅介绍硬件。
激光雷达结构
量产车型激光雷达大多根据扫描方式分类,其中半固态(也叫混合固态)有转镜方案,棱镜方案,微振镜方案,全固态有OPA方案,Flash方案和电子扫描方案。机械雷达受限于体积和使用寿命问题无法大量在量产车型上使用,更多的用于算法标定和Robotaxi领域。
激光雷达主要包括激光罩,光发射部分,光学扫描部分,激光接收部分,信息处理,PCB板,结构件部分。
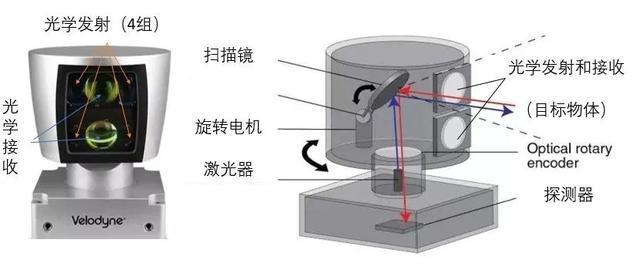
(机械雷达比较形象,尤其是右图)
光罩的作用比较简单,通过涂层和叠层结构,达到限制自然光进入,只通过定波长的光的作用。
激光发射端主要作用是发射激光光源,同时对光的基本特性进行调制。

光源发射器件主要有EEL、VCSEL、PSCEL。EEL发光面位于半导体晶圆的侧面,具有高发光功率密度的优势,但生产成本较高,且一致性较差。VCSEL发光面与半导体晶圆平行,其所形成的激光器阵列易于与平面化的电路芯片键合,但传统的VCSEL发光功率密度低,现在通过开发多层结VCSEL提升功率密度,进而取代EEL。如ibeo激光源便是VCEL,激光器供应商为奥地利艾迈斯半导体。PSCEL是EEL和VCSEL的集成,使用使用面内反馈和面外表面发射的激光器,目前还未大规模使用,代表企业有Vector。
车载激光波长主要有905nm和1550nm两种。905nm具备成本优势,早期机械激光雷达多采用此波长,但1550nm功率大,抗干扰性更好,后续有倾向采用1550nm波长,如Innovusion,禾赛科技,Luminar,Innoviz,Aeye,镭神智能都采用了1550nm波长光源。
光调制主要根据测距算法来确定,现在主流的是TOF测距,FCMW方案在研居多,未来预计两者将会并存。当然不同的算法对光源脉冲的要求也不同。
扫描部分是通过控制激光反射方向实现扫描探测,也是区分机械雷达和固态雷达(固态没有扫描部分)的关键部分。
棱镜式激光雷达比较典型的便是Livox,光线通过棱镜后会发生折射,进而改变发射方向。Livox采用双棱镜方案增加FOV角度,花瓣式扫描方案扩大点云密度,转速约600r/min。
转镜式方案采用多边形转镜发射改变激光发射方向,如Innovusion便采用了此种技术。结合电流扫描振镜实现了等效300线的能力。电子扫描方案按照时间顺序通过依次驱动不同视场的收发单元实现扫描。Flash则是短时间发射面阵光源。

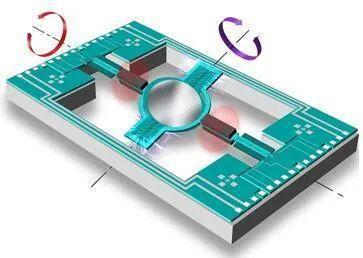
MEMS即通过微振镜改变激光方向,速腾聚创、禾赛科技、Innoviz均有产品。通过叠加微振镜的层数,可扩大FOV角度。MEMS方案能实现激光雷达小型化的目的,但整体成本受制于微振镜还是略高,同时微振镜也会带来寿命问题。
OPA采用光学相控阵技术,通过施加电压调节每个相控单元的相位关系,利用相干原理,实现发射光束的偏转,从而完成系统对空间一定范围的扫描测量。电子扫描方案按照时间顺序通过依次驱动不同视场的收发单元实现扫描。Flash则是短时间发射面阵光源。
信息处理即对反馈光线形成的点云进行解析,输出点云内容。目前开发专用芯片替代原FPGA、DSP芯片。
总结
总体来说激光雷达在量产车领域还处于非常早期的阶段,当前除了可以判断机械激光雷达排除应用之外,尚未看到有明确的技术方向。考虑到车载对性能和成本的要求,短期内半固态激光雷达更容易受到客户青睐。







